There’s a slightly weird terminology I keep hearing in various 3D applications. Those terms are Yaw, Pitch and Roll. I have trouble remembering which one is which, and which one is related to what axis in 3D space. I’m more used to the Euler notation system, and the only one I can remember is “roll” as it’s related to Camera Roll (that’s used in infamous Dutch Angle shots, where the final image is tilted clock/counter-clockwise).
So where do these words come from, and what do they mean in 3D rotation?
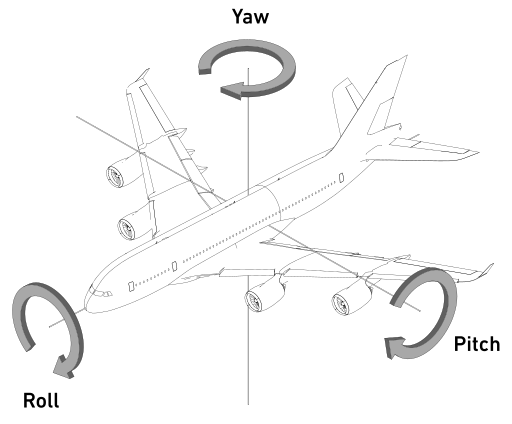
Wikipedia tells us they’re all related to aircraft navigation. I suppose an object in 3D space behaves the same way, and as such its rotation can be addressed with Yaw, Pitch and Roll as well. They have these helpful illustrations in this article I may have borrowed for illustration purposes:
If only the Up Axis was Y in every 3D app, we could remember it easily (because of Y and Yaw) – but we’re not so lucky. At least the DAZ Studio users among us may have a slight memory aide here. It’s like driving, there’s no right or wrong way. I deal mostly with apps that have apps that use Z as the up axis, so I thought I’d devise this handy table here:
Yaw, Pitch and Roll (for Z-Up Apps)
- Yaw – rotation along the Z axis
- Pitch -rotation along the Y axis
- Roll – rotation along the X axis
Z-UP 3D apps include Blender, Carrara, 3DS Max, Unreal Engine and Unity. Let me know any others and I’ll add them here.
Y-Up 3D apps include DAZ Studio, Maya, Modo and Lightwave. For those apps, swap Yaw and Pitch in the table above.
Hope this helps!
Max is actually Z-up.
Thank you so much Dustin! I’ll correct this immediately 🙂